Home
Home
 Robotics & Automation
Robotics & Automation
 About Grasp 10
About Grasp 10
 Key Features
Key Features
Key Features
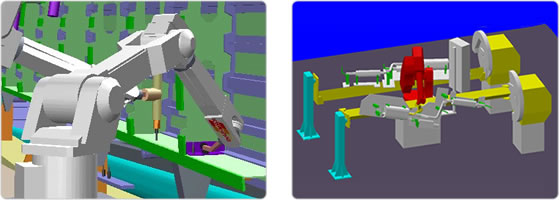
Grasp10 is an advanced PC based 3D simulation tool for robotics systems and automated processes. Developed for over 20 years, it was the first 'high end' simulation tool to be implimented on the PC.
With an intuitive Windows style interface, Grasp10 features a unique range of additional modules to tailor the application to your needs. From robot off-line programming to full factory simulation, Grasp10 is a turnkey 3D simulation solution developed for professionals.
Key Features include:
- Windows style interface and menu system with icon toolbars.
- High level interactive 3D graphics.
- In built interactive 3D solid modeller.
- Robot reach validation and configuration checks.
- Cycle time analysis.
- Dynamic collision and near miss detection.
- General kinematic modeller with a library of industrial robots.
- Support for multiple robots and synchronised external axes.
- Macro driven real-time interactive simulation playback, for results presentation and demonstrations.
- Output of simulation models in avi, VRML, Runtime and Grasp10 Preview formats.
- Off-line programming with support for most native robot languages. Grasp10 uses accurate robot and work-cell calibration techniques with no external measuring equipment required.