
 Home
Home
 Robotics & Automation
Robotics & Automation
 About Grasp 10
About Grasp 10
 Design & Planning
Design & Planning
Design & Planning
Grasp10 is a powerful and versatile tool for the design and planning of robotic and highly automated facilities.
Use Grasp10 to simulate and assess different scenarios prior to investment, overcoming potential problems or bottlenecks. Then present complex solutions to customers or students, using the highly visual 3D simulations.
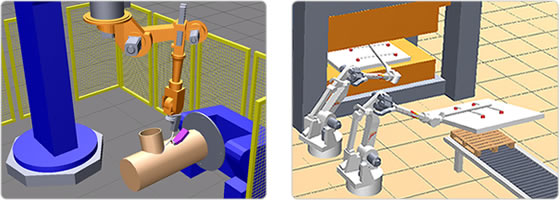
Simulation models can be easily created in Grasp10, using the built in solid modeller to combine data from the library of industrial robots, model objects, and imported CAD data. Movement instructions are made independent of robot type and can be defined relative to the positions of other model objects.
These features allow for:
- Rapid evaluation of different physical layouts.
- Simple assessment of different robots for the same task (for instance: reach, configuration, joint velocity violations etc.)
- Calculation of cycle times.
- Confirmation of the correct integration and synchronisation of all the elements within a system.
- Identification of collisions and near misses.

