主页
主页
 机器人与自动化
机器人与自动化
 关于Grasp10
关于Grasp10
 工厂模拟
工厂模拟
 物流与仓储
物流与仓储
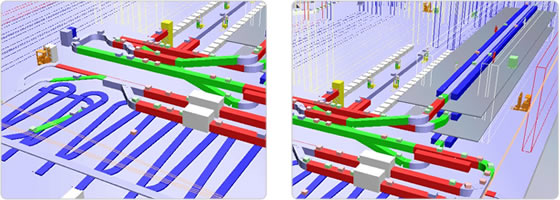
工厂模拟
Grasp10的独特之处在于对于离散事件以及生产流程模拟的无缝整合。
这使得独立的加工过程可以得到延伸或者整合到周围的工厂环境之下。比如:一个工程师可以在同一个工厂模型之内,查找机器人与其他周围的生产环境,设备及产品的关系。
整个工厂的模拟是通过以下搭配来实现的:
- 精确的三维立体模型
- 基于物理学的静力学,动力学
- 同步过程或者离散事件模拟
- 对于制造系统,传送带,工厂布局以及网络的支持
- 基于物体性质的产品跟踪
- 机器人应用菜单
整个结果对于工厂模拟是一个完整的解决方案,其中复杂的产品流程以及瓶颈可以通过同步过程得以实现。模拟结果可以通过一系列的动态统计图形,自动生成的报告,以及工厂全景模拟进行展现。