
 主页
主页
 机器人与自动化
机器人与自动化
 关于Grasp10
关于Grasp10
 设计与规划
设计与规划
 物流与仓储
物流与仓储
设计与规划
Grasp10 是一款功能强大以及多样化的模拟工具,它可以用来设计以及规划机器人以及自动化设备。
在投资之前,Grasp10可以用来模拟以及评估不同的场景,以及克服潜在的风险,问题以及瓶颈。然后,通过图形化的三维模拟为客户呈现解决方案。
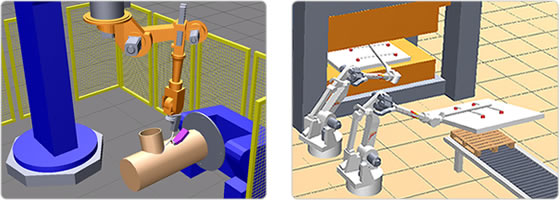
实物模型可以使用Grasp10轻易创建,使用内建的三维物体模拟器来合并来自于工业机器人数据库机器人模型,实物模型以及导入的CAD数据。Grasp10的动作指令是独立于机器人类型的,而且可以相对于其他模型物体的位置去被定义。
这些特色可以使得:
- 对于系统不同物理布局的快速评价
- 基于相同的任务,对于不同机器人的简单快捷的评价(比如:机器人的活动范围,配置,轴速度等等)
- 循环时间的计算
- 对于系统之中所有元素的整合以及同步的确认
- 对于碰撞以及接近位置的的识别

